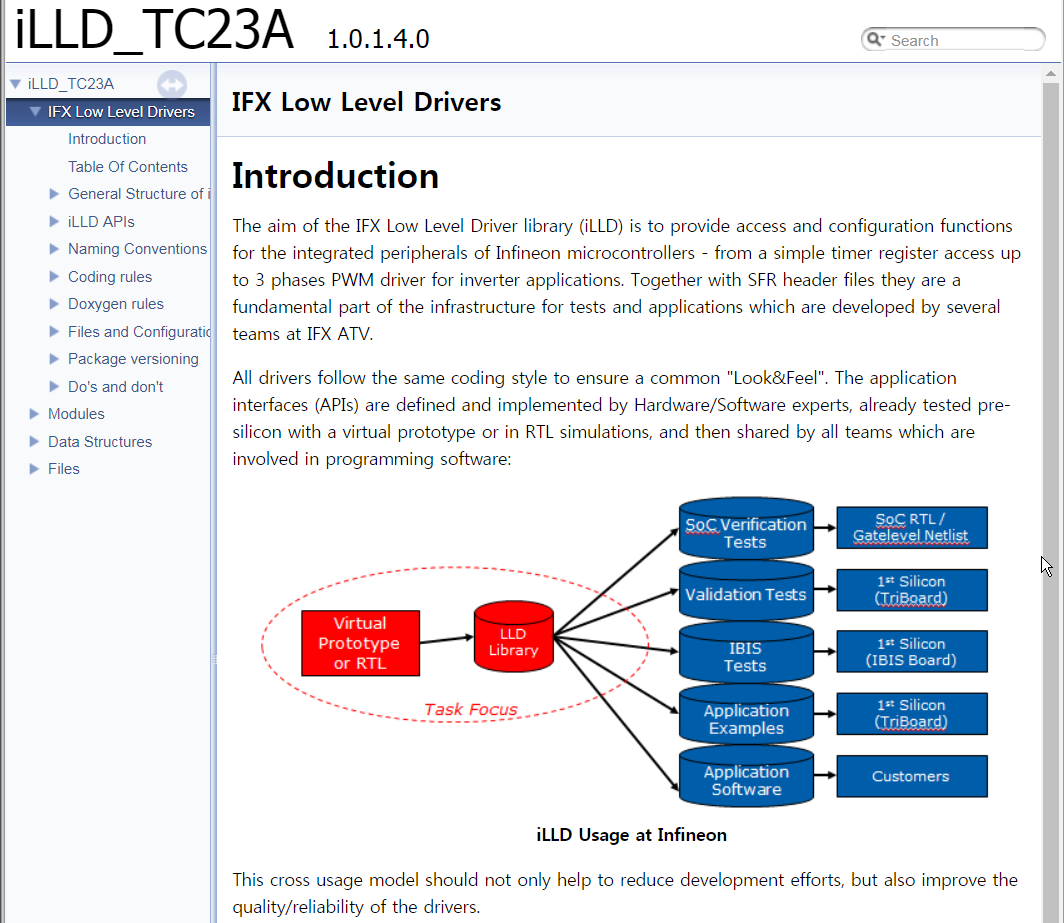
What is iLLD?
시작하는 질문
- AURIX를 사용해 보려고 한다. 무엇을 보아야 하나? 어떤 코드를 참고해야 하나?
- iLLD라는 것이 있다는데, Low-Level Driver 라고? 이것은 무슨 의미이지? 어떻게 사용하는 것이지?
Objectives
- iLLD의 구조를 이해하고
- iLLD의 도움말을 참고해서 이해하는 방법과
- iLLD의 Demo code와 AURIX User Manual을 참고하는 방법을 익힌다.
References
- iLLD_TCXX 1.0.1.8.0 도움말: IFX Low Level Drivers
- AURIX TC23x Family User's Manual - Toc & Introduction
- AURIX TC27x Family User's Manual - Toc & Introduction
- iLLD_1_0_1_8_0_TC2xx_Demos - StmDemo
[Example Code]
- _iLLD_Framework_AK_TC23A
- _iLLD_Framework_SB_TC27A
- MyPort_AK_TC23A
- MyPort_SB_TC27D
- MyStm_AK_TC23A
- MyStm_SB_TC27D
관련 자료 살펴보기
AURIX User's Manual 참고하는 방법
- User's Manual - 파일을 찾아 열어보니 3435page 라고? 이것을 읽어볼 수는 있는 것인가?
- 읽어 보아야 하는 것이다. 절대적(?)인 자료이다.
- 순서대로 읽는 것이 아니라 구조적으로 읽어야 한다.
- 매뉴얼 구조적 읽기
- 새로운 것이 아니다. 필요한 정보 필요할 때 읽자는 말이다.
- 구조를 파악하는데 필요한 내용은 찬찬히
- 사전적인 내용은 필요할 때 찾아보자
[EXERCISE]
- AURIX 전체 구조를 파악하는데 필요한 내용은? 다시 말해서 시작하면서 꼭 읽어보아야 하는 내용은?
- ToC; 약자에 친해지자
- 1.Introduction
- 3.On-Chip System Buses and Bus Bridges
- 4.Memory Maps; Linker의 memory map 이 해결해 준다.
- 5.BootROM Contents; Debugger로 다운로드 하면 Flash 영역에 들어가고 부팅하면 실행된다. 지금은 고민 말자.
- 6.CPU Subsystem; Compiler가 해결해 준다.
- 나머지 챕터는 각 서브시스템별 설명이다. 필요할 때 찾아보면서 이해해 가면 된다.
iLLD Help 참고하는 방법
-
iLLD는 설치했는데 어떻게 사용하는 것이지? 설명서는 어디 있는 것인가?
- iLLD_1_0_1_8_0_TCXX/Doc/TCXX/html/index.html 파일을 열면 browser 로 확인할 수 있다.
- 별도의 문서를 따로 만든 것이 아니라 BIFACES의 DoxyGen 기능을 사용하여 생성한 문서이다.
-
도움말의 목차를 보니 어마어마 하다. 이것은 어떻게 읽어야 하는 것이지?
- 매뉴얼과 마찬가지로 구조적 읽기를 해야 한다.
- iLLD를 기준으로 iLLD 자체에 대한 설명을 하는 부분을 우선적으로 읽고
- 모듈, 즉 AURIX의 서브시스템과 그 외에 부가적으로 제공하는 함수들을 필요에 따라 찾아보면 된다.
[EXERCISE] iLLD의 기본 구조와 활용법을 이해하기 위해서 [IFX Low Level Drivers] 부분을 읽고 다음의 질문에 답해 보세요.
-
in General Structure of iLLDs
- Content of Peripheral Drivers ?
- Configuration Data Structures ?
- Handles ?
-
in iLLD Module의 초기화 API?
<Driver Prefix>_initConfig(<Driver Prefix>_Config *cfg);
<Driver Prefix>_init(<Driver Prefix>_Handle *handle, <Driver Prefix>_Config *cfg);
- iLLD Module의 기능 API?
<Driver Prefix>_<functionality>(<Driver Prefix>_Handle *handle)
- in Naming Conventions (Open MyStm_ Project)
// in Src\AppSw\Tricore\StmDemo.h
typedef struct
{
Ifx_STM *stmSfr; /**< \brief Pointer to Stm register base */
IfxStm_CompareConfig stmConfig; /**< \brief Stm Configuration structure */
volatile uint8 LedBlink; /**< \brief LED state variable */
volatile uint32 counter; /**< \brief interrupt counter */
} App_Stm;
// in Src\AppSw\Tricore\StmDemo.c
App_Stm g_Stm;
//
IfxStm_initCompareConfig(&g_Stm.stmConfig);
//
IfxStm_initCompare(g_Stm.stmSfr, &g_Stm.stmConfig);
-
To find
IfxStm_CompareConfigtype definition &IfxStm_initCompare()method definition- 위의 정의들은 어느 디렉토리의 어느 파일에 되어 있나요?
- [Hint] 해당하는 definition 을 선택하고
F3혹은Open Declarationmenu 선택
-
Cpu/Std/Platform_Types.h 파일을 열고 다음의 정보들을 확인해 보세요
- Bit order: MSB_FIRST or LSB_FIRST
- Byte order: HIGH_BYTE_FIRST or LOW_BYTE_FIRST
- sint8 ?
- uint8 ?
- in Files and Configuration
- 다음 폴더에 있는 파일들의 용도를 설명하세요.
- _Reg:
- _Impl:
- _PinMap:
- _Lib:
- Port:
[EXERCISE] iLLD에서 제공하는 모듈들의 종류와 용도를 [Modules] 에서 설명하고 있습니다. 이것을 참고해서 다음의 질문에 답해 보세요.
- Module 은 크게 다음의 두가지로 분류될 수 있습니다. 각각의 차이는 무엇일까요?
- iLLD
- Service software
- iLLD/General functionalities/Data handling/Circular buffer 와 FIFO 가 있습니다. 각각의 용도는 무엇일까요?
- Circular buffer
- FIFO
- iLLD/Service software/System Engineering/ Board Support package/Board support package/initTime 과 wait 을 선택하고 그 설명을 확인해 보세요.
- initTime()
- wait()
- iLLD/Service software/System Engineering/Math/Look-ups/Look-ups float32/ 을 선택하고 어떤 기능을 하는 모듈인가 설명해 보세요.
- iLLD/Service software/System Engineering/Math/Math 32bit floating point/Low-pass Filter/ 를 선택하고 어떤 기능을 하는 모듈인가 설명해 보세요.
iLLD Demo code를 참고하는 방법
- iLLD Demo는 설치했는데 어떻게 사용하는 것이지?
- 아래 그림과 같이 iLLD의 모듈명과 일치하는 Demo 밑에 0_Src 라는 폴더와 Doc 이라는 폴더를 각각 가지고 있다.
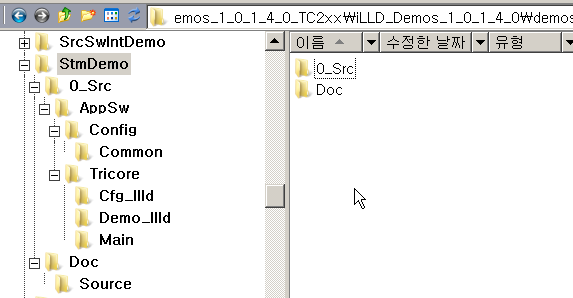
- 0_Src/AppSw 를 해당하는 BaseFramework 의 폴더에 복사하면 빌드할 수 있다.
- /Doc 폴더 밑에는 예제에 대한 간단한 설명이 기술되어 있다. 이 폴더를 복사해서 DoxyGen 을 실행하면 해당 내용을 포함하는 문서를 생성할 수도 있다.
- 아래 그림과 같이 iLLD의 모듈명과 일치하는 Demo 밑에 0_Src 라는 폴더와 Doc 이라는 폴더를 각각 가지고 있다.
- Demo 프로젝트의 특징
- AURIX의 다양한 Variant 들을 고려하여 하드웨어적인 의존성을 최소화 하여 구성되어 있다. Multi-core 칩에서도 실행해 볼 수 있다.
- 모듈간의 의존성을 최소화 하여 해당 모듈만 독립적으로 실행해 볼 수 있다.
- iLLD의 설정은 Cfg_Illd 폴더에서,
- iLLD의 전형적인 활용 예는 Demo_Illd 폴더에서
- 함수의 실행은 Main 폴더의 main 함수에서
- 기본 iLLD Module 이 아닌 것은 iLLD Library 폴더에서 복사해 와야 한다.
My project 만들기 - MyStm_TC23A(TC27D)
Target board 에 관하여
- Aurix Tutorial에서는 모든 예제 프로젝트가 TC23A와 TC27D를 지원하도록 구성되어 있다.
- 우리가 AURIX의 다양한 기능들을 사용하기 위한 부분은 위의 두 보드에 상관없이 동일하게 구성되어 있으며
- 각 보드에 따라서 사용하는 iLLD와 이에 따라 Hardware configuration에 대응하는 부분만 차이를 갖는다.
- TC237 Application Kit 을 사용하는 경우 iLLD_1_0_1_8_0_TC23A를
- TC275 Shield Buddy 을 사용하는 경우 iLLD_1_0_1_8_0_TC27D를 사용하면 된다.
- iLLD의 사용 예가 포함된 demo project는 iLLD_1_0_1_8_0_TC2xx_Demos를 공통으로 사용한다.
- TC23A를 사용할 경우 project_name에 TC23A가 있는 project를, TC27D를 사용하는 경우 TC27D를 포함하는 project를 이용하여 예제들을 진행하면 된다.
Example Description
- StmDemo 예제를 구성해서 실행해 보자
- Stm을 사용하여 Port 출력으로1초마다 토글, 즉 2초 주기로 LED를 점멸해 보자
[첫단계] _MyiLLDFramework_TC23A(TC27D) 만들기 <= BaseFramework_TC23A(TC27D) + iLLD sources
- iLLD를 사용할 수 있는 Framework 만들기
- BaseFramework에는 최소한의 iLLD 구성 요소만 들어 있음
- 필요한 모듈만 /0_Src/BaseSw 로 복사해서 선택적으로 사용해야한다.
- 매 프로젝트마다 필요한 파일을 찾아서 복사하기 매우 번거로우므로 iLLD 소스를 모두 복사해서 사용
- 항후 iLLD관련 프로젝트를 만들 때 이프로젝트를 복사해서 사용한다.
- [Action] 생성된_MyiLLDFramework_TC23A(TC27D) 프로젝트에 iLLD 파일들 추가
- 사용하려고 하는 프로세서에 맞는 프로젝트를 선택
- 프로젝트내
/0_Src폴더 생성 (대소문자 구별 유의!!!) _LibSrc/iLLD_1_0_1_8_0_TC23A(TC27D)/Src/BaseSw를 통째로_MyiLLDFramework_TC23A(TC27D)/0_Src/BaseSw로 복사- 모든 iLLD 모듈을 사용할 수 있게 된다.
- [Check] 프로젝트를 빌드하고 실행해 본다.
[둘째단계] MyStm_TC23A(TC27D) 만들기
- StmDemo 예제를 복사, 혹은 import, 해서 실행해 본다.
- [Action] _MyiLLDFramwork_TC23A(TC27D) 복사해서 MyStm_TC23A(TC27D) 프로젝트를 만든다.
- 프로젝트 폴더네의 .project (PROJECT 파일)을 text editor(워드패드 추천)로 연다.
- 그 후 프로젝트 이름을 다음과 같이 변경한다.
<name>MyStm_SB_TC27D</name> - iLLD demo 프로그램을 다운로드 한다.
/iLLD_1_0_1_8_0_TC2xx_Demos/StmDemo/0_Src/AppSw밑의 파일들을 모두 복사해서MyStm_TC23A/0_Src/AppSw로 붙여 넣는다./iLLD_1_0_1_8_0_TC2xx_Demos/StmDemo/Doc/밑의 텍스트 파일을 열어본다. 프로그램 동작에 관한 간단한 설명이 나와 있다.
- [Check] 프로젝트를 빌드하고 실행해 본다. 실행은 되고 브레이크 포인트도 동작하지만 LED가 점멸되지는 않는다.
[세째단계] Customization
- 사용하는 Board와 CPU에 맞게 코드를 Customization 한다.
- [Action1] mainPage.dox 파일을 열고 다음의 내용을 확인해 보세요
- 이 프로그램의 동작은?
- 사용하는 LED는 어느 핀에 연결되어 있어야 하는가?
- 이 코드는 어떤 보드에서 확인이 된 것인가?
- [Action2] 보드의 메뉴얼과 도면을 참조해서 LED 포트의 연결을 확인해 보세요.
- AppKit TC237 보드의 LED107 은 어떤 포트에 연결되어 있는가?
- Shield Buddy 의 LEDYELLOW (D401) 은 어느 포트에 연결되어 있는가?
- [Action3] /Demo_Illd/StmDemo.c 파일을 열고 다음의 사항을 수정해 보세요.
- 각 LED 포트를 점멸할 수 있도록 해당 내용을 찾아 수정해 보세요.
- [Check] 프로젝트를 빌드하고 실행해 본다. LED가 2초 주기로 점멸한다.
- [Exercise] 2초 주기 => 0.2초 주기로 변경해 보세요.
Demo Code를 분석하는 방법 Summary
위와 같은 방식으로 해당 모듈에 대한 Demo Code를 분석하고 실행해 볼 수 있습니다.
- Demo Code의 문서파일을 열어서 해당 동작을 살펴보고
- 이제 _MyiLLDFramework_TC23A 와 iLLD의 Demo Code를 합치고
- 사용하는 Board 와 용도에 맞게 수정하면 됩니다.
이제 AURIX 서브시스템과 iLLD의 활용 방법을 연습하며 하나씩 이해해 나갈 수 있게 됩니다.
MyPort_ 만들기
- StmDemo를 살펴보니 디지탈 출력, 즉 Port를 사용하여 On/Off 하는 동작 코드가 들어 있습니다.
- 이 코드를 활용해서 InfineonRacer 에서 디지털 입출력을 할 수 있는 모듈로 설계하고 구현해 보자.
//in StmDemo.c
static void IfxBlinkLed_Init(void)
{
#if BOARD == APPLICATION_KIT_TC237
IfxPort_setPinMode(&MODULE_P13, 0, IfxPort_Mode_outputPushPullGeneral);
#elif BOARD ==SHIELD_BUDDY
IfxPort_setPinMode(&MODULE_P10, 2, IfxPort_Mode_outputPushPullGeneral);
#endif
}
static void setOutputPin(Ifx_P *port, uint8 pin, boolean state)
{
if (state)
{
IfxPort_setPinState(port, pin, IfxPort_State_high);
}
else
{
IfxPort_setPinState(port, pin, IfxPort_State_low);
}
}
Example Description
- Target board의 구체적인 하드웨어 핀과 설정 정보를 추상화하여
- LED0, 1, 2 를 점멸할 수 있는 함수와
- Port0.0, Port0.1 의 정보를 읽어들일 수 있는 함수를 만들자
- 구조체를 만들어서 이 값을 관리할 수 있도록 하자.
Hardware
- iLLD는 서브시스템 하드웨어를 추상화 한 것이지, 없는 하드웨어의 기능을 만든 것이 아니다.
- User's Manual에서 해당 내용에 대한 개략적인 구조와 특징은 이해해야 한다.
- Must-Read Section
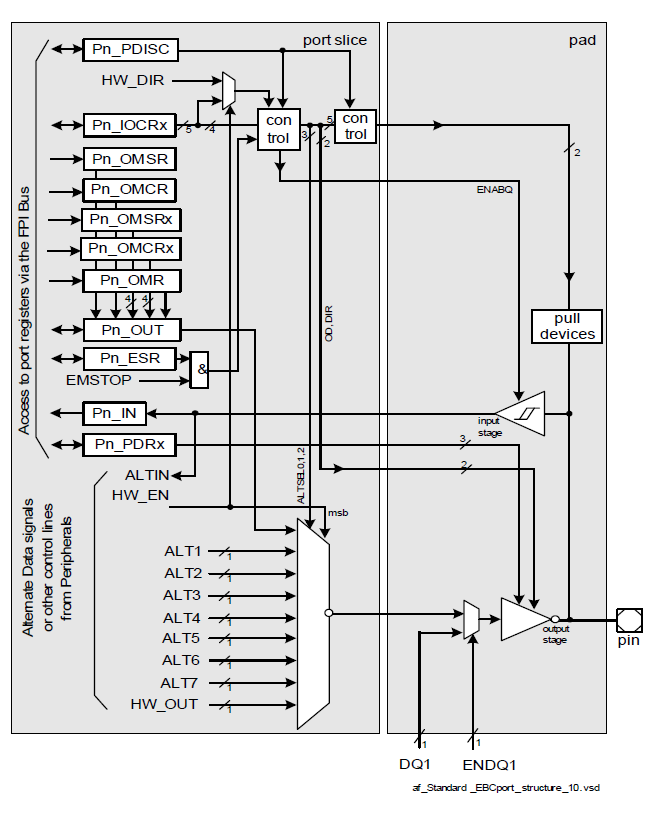
- User's Manual Chap14 GPIO(Ports) pp 976 - 982
- Port는 여러 Slice로 구성되고 각 Slice는 다음과 같은 구조를 가지고 있다.
- 한마디로 .... 복잡하다.
- 이 그림의 네모 상자들이 모두 레지스터 들이다.
- 이 레지스터에 값을 결정해 주어야 사용할 수 있고, 이 레지스터를 통하여 입출력 할 수 있다.
- Port의 기능에 대한 설명은 User's Manual을 꼭 참고하십시요. 이곳에서는 생략하도록 하겠습니다.
iLLD - related
-
iLLD의 Port Manual을 어떻게 살펴보아야 하는가?
-
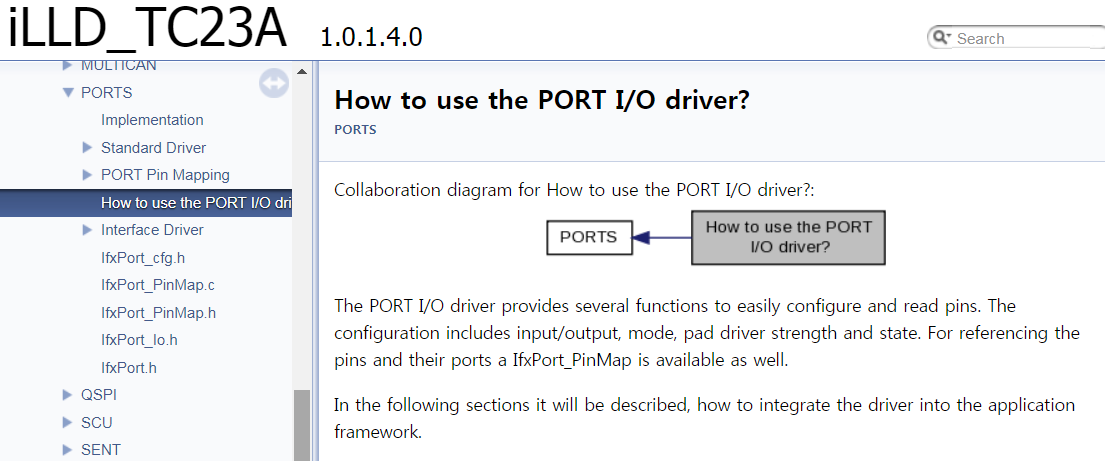
각 모듈의 iLLD Help 를 살펴보면 구조와 자료형, 메쏘드, 관련 파일 등 관련 정보들이 사전적으로 나옵니다.
-
대표적인 사용예로 How to use the Module... 영역이 있습니다.
-
User's Manual 에서 해당 모듈의 구조와 특징을 살펴보았듯이 전형적인 사용예에 대하여 How to use 영역을 찬찬히 살펴보면 됩니다.
-
[Exercise] How to use the Port I/O 영역을 읽어보고 다음의 질문에 답하세요.
- Port iLLD를 사용하기 위해서는 어떤 헤더 파일을 include 해야 하나요?
- P13.0 (TC237의 LED0)을 출력으로 설정하기 위해서는 어떻게 Pin Mode를 설정해야 하나요?
- TC275는 P10.2를 출력으로 설정해 준다
- P13.0 을 High 상태로 출력하려면 어떤 함수를 어떻게 해야 하나요?
- P00.0 을 입력으로 설정하기 위해서는 어떻게 Pin Mode를 설정해야 하나요?
-
P00.0 의 입력을 읽어들이려면 어떤 함수를 어떻게 사용해야 하나요?
-
How to use 영역을 살펴보다 보면 구체적인 Method에 대하여 궁금해지고, 그 Method에서 사용하는 자료형 등에 대하여 확인할 필요가 있습니다. 이때 해당 함수, Method에 대하여 검색, 혹은 Link를 사용해서 찾아보면 됩니다.
[Exercise]
IfxPort_setPinMode()함수의 정의를 찾아보세요. 그리고 파라메터의 종류와 의미들에 대하여 찾아보세요.IfxPort_Mode는 무엇인가요? 이것에 대한 정보를 찾아보세요.- LED를 켜고 끄는 용도로 사용하려면 어떤 값으로 설정해야 하나요?
- 디지탈 입력을 읽어들이는 용도로 사용하려면 어떤 값으로 설정해야 하나요?
[Summary] IO 서브시스템과 iLLD 활용하는 방법
- 하드웨어의 구조에 대하여 이해합니다.
- 해당하는 iLLD의 사용예를 살펴 봅니다.
- 나의 사용 방법과 직접적인 관련이 있는 내용을 찬찬히 살펴보며
- 해당 Method 와 Structure, Enumeration 정보들을 구체적으로 찾아봅니다.
- 내가 사용할 코드 조각, 보통 snippet 이라고 합니다,을 구성합니다.
- 필요하면 별도의 테스트 프로젝트를 구성하여 이와 같은 분석 작업을 진행합니다.
[MyIlldModule_ vs. InfineonRacer 프로젝트 구성]
- MyIlldModule_은 IO subsystem과 iLLD Module을 시험하기 위한 프로젝트입니다.
- InfineonRacer는 시험된 모듈을 활용하여 용도에 맞게 개발해 가는 프로젝트 입니다.
Ports in InfineonRacer
위와 같이 Port 관련 라이브러리에 대하여 기본적인 이해를 한 후 내 사용예에 맞게끔 프로그램을 설계합니다.
[첫번째] 자료구조와 API 설계
-
알고리즘 보다 어떻게 사용할 것인가?가 오백배 더 중요하다.
- 프로그래밍을 처음 학습할 때는 알고리즘에 집중해서 기능 구현에 치중하게 됩니다.
- 이렇게 만들어진 기능은 작성한 사람을 위한 것이지, 정작 이 기능을 사용하는 사람의 편의성은 전혀 고려되지 않은 경우가 많습니다.
- 어떻게 만들 것인가 보다 어떻게 사용할 것인가를 먼저 고민해서 함수, 모듈, 객체를 설계해야 다른 사람이 사용할 수 있습니다.
- 다른 사람을 위해서가 아니라, 바로 내가 이것을 사용할 첫번째 사용자 입니다.
-
객체는 자료와 Method의 조합
- 객체지향적으로 프로그래밍을 하면 재사용성, 은닉성 등등 좋은 점이 많습니다.
- C++ 만으로 이것이 가능한 것은 아닙니다.
- C 언어로 객체지향적으로 모듈을 만들 수 있습니다.
- Class member 대신 구조체로, Class function 대신 연관된 함수들로, 그리고 이것들을 좋은 명명법을 사용해서 이름을 붙이면 모듈화된 객체를 만들어 사용할 수 있습니다.
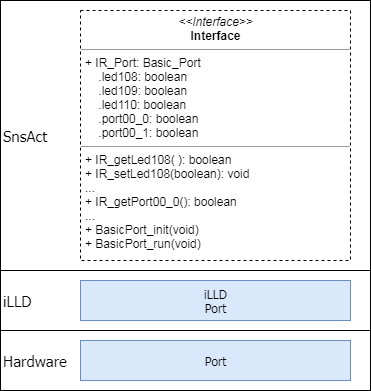
- Header 파일은 사용자가 참고해야 하는 정보들의 집합
- 다음의 코드와 같이
IR_Port구조체를 만들고IR_getXXX(),IR_set()스타일로 함수들을 설계합니다.- 이러한 정보들로 Header를구성합니다.
// in AppSw\Tricore\Main\BasicPort.h
typedef struct
{
volatile boolean led0;
volatile boolean led1;
volatile boolean led2;
volatile boolean port00_0;
volatile boolean port00_1;
} Basic_Port;
IFX_EXTERN Basic_Port IR_Port;
// PORT 값 호출
#define IR_getLed0() IR_Port.led0
#define IR_getLed1() IR_Port.led1
#define IR_getLed2() IR_Port.led2
#define IR_getPort00_0() IR_Port.port00_0
#define IR_getPort00_1() IR_Port.port00_1
// PORT 값 설정
IFX_EXTERN void IR_setLed0(boolean led);
IFX_EXTERN void IR_setLed1(boolean led);
IFX_EXTERN void IR_setLed2(boolean led);
[두번째] Library 예제 코드, Snippet을 조합하여 기능 구현
- 라이브러리 분석으로 얻은 정보들로 해야하는 기능 함수들을 구현합니다.
-
다음과 같이 구조적으로 함수와 변수들에 대하여 설계를 하고 각각을 구체화 합니다.
-
설정 정보 추출
- TC237보드와 TC275보드의 port pin이 다르기때문에 각각 board에 맞는 port를 output port로 정의한다.
#if BOARD == APPLICATION_KIT_TC237
#define LED_TICK IfxPort_P13_0
#define LED0 IfxPort_P13_1
#define LED1 IfxPort_P13_2
#define LED2 IfxPort_P13_3
#define PORT00_0 IfxPort_P00_0
#define PORT00_1 IfxPort_P00_1
#elif BOARD == SHIELD_BUDDY
#define LED_TICK IfxPort_P10_2
#define LED0 IfxPort_P00_4
#define LED1 IfxPort_P00_3
#define LED2 IfxPort_P00_2
#define PORT00_0 IfxPort_P00_0
#define PORT00_1 IfxPort_P00_1
#endif
- 초기화 함수
void BasicPort_init(void)
{
/* IR_Port 변수 초기화 */
IR_Port.led0 = TRUE;
/* LED Port output */
IfxPort_setPinMode(LED0.port, LED0.pinIndex, IfxPort_Mode_outputPushPullGeneral);
IfxPort_setPinPadDriver(LED0.port, LED0.pinIndex, IfxPort_PadDriver_cmosAutomotiveSpeed1);
setOutputPin(LED0.port, LED0.pinIndex, IR_Port.led0);
/* Digital Input */
IfxPort_setPinModeInput(PORT00_0.port, PORT00_0.pinIndex, IfxPort_InputMode_noPullDevice);
IR_Port.port00_0 = IfxPort_getPinState(PORT00_0.port, PORT00_0.pinIndex);
}
- 입출력 함수
// 입력 함수 //
void IR_setLed0(boolean led){
if(led != FALSE){
led = TRUE;
}
IR_Port.led0 = led;
}
// 출력 함수//
#define IR_getLed0() IR_Port.led0
- 주기적 실행 함수
void BasicPort_run(void)
{
/* LED Port output */
setOutputPin(LED0.port, LED0.pinIndex, IR_Port.led0);
setOutputPin(LED1.port, LED1.pinIndex, IR_Port.led1);
setOutputPin(LED2.port, LED2.pinIndex, IR_Port.led2);
/* Digital Input */
IR_Port.port00_0 = IfxPort_getPinState(PORT00_0.port, PORT00_0.pinIndex);
IR_Port.port00_1 = IfxPort_getPinState(PORT00_1.port, PORT00_1.pinIndex);
}
static void setOutputPin(Ifx_P *port, uint8 pin, boolean state)
{
if (state)
{
IfxPort_setPinState(port, pin, IfxPort_State_high);
}
else
{
IfxPort_setPinState(port, pin, IfxPort_State_low);
}
}
-
[참고] 주기적 실행 함수,
Module_run()함수를 구성하는 이유-
IR_setLed1()함수에서 LED1의 상태 변수를 변경하고 -
BasicPort_run()함수에서 상태 변수 값으로 해당 포트에 출력을 합니다. -
이 두가지 일을 하나의 함수로 묶어서 처리해도 됩니다.
-
그러나, 이와같이 Event 방식으로 정보를 처리하고 Periodic 하게 실제 입출력을 처리하는 이유는 실제 제어시스템들은 이벤트 방식으로 처리하는 것보다 주기적인 방식으로 처리하는 것이 안정되기 때문입니다.
-
Scheduler 부분에서 구체적인 구현 방식에 대해서는 설명할 것입니다만, 디지탈제어의 기본 전제 조건은 균일한 샘플링 주기 입니다.
-
시스템의 보호나 예외상황의 처리와 같은 사건들은 스케쥴러를 통하지 않고 바로 처리하도록 구성할 수도 있습니다.
-
[세번째] Test & Debug
- 구성된 Module 에 대한 사용자 입장에서의 평가 와 기능 시험
- Test Bench 를 구성
- main 함수를 사용해서 초기화 함수 호출, 주기 함수 호출
- 디버거를 사용해서 중요한 변수값 모니터링 및 변경하며 모듈의 동작 여부 확인
- 필요한 경우 추가적인 테스트 코드 구성
/* Initialization section */
printf("Initialization started\n");
initTime(); // Initialize time constants
BasicPort_init();
/* background endless loop */
printf("Background loop started\n");
while (TRUE)
{
BasicPort_run();
wait(TimeConst_100ms*5);
}
[네번째] Optimization & Clean-up
- 기능이 동작한다고 프로그래밍이 끝난 것이 아니다.
- 청소부터 해야 한다. 쓸데 없는 주석은 없는지, 시험을 위해서 임시로 삽입된 코드는 없는지
- 메모리와 속도 측면에서 최적화 해야 한다.